2024年10月23日 星期三
說(shuō)起自動(dòng)駕駛,現(xiàn)如今早已不是什么新鮮概念。從小時(shí)候開(kāi)始,自動(dòng)駕駛汽車(chē)就在大熒幕中頻頻出現(xiàn),到如今自動(dòng)駕駛技術(shù)逐步走向成熟,走出熒幕,這一切都離不開(kāi)科學(xué)技術(shù)的快速發(fā)展。不過(guò)在如此多廠商研發(fā)自動(dòng)駕駛技術(shù)的今天,你知道自動(dòng)駕駛究竟有幾種方式可以實(shí)現(xiàn)么?接下來(lái),就讓我們探究一二。
在現(xiàn)有技術(shù)水平上,自動(dòng)駕駛大致可以分為兩種技術(shù)路線:
第一種是基于車(chē)輛現(xiàn)有雷達(dá)和傳感器,以ADAS(Advanced Driver Assistance Systems高級(jí)駕駛輔助系統(tǒng))為切入點(diǎn),進(jìn)行的自動(dòng)駕駛研究。這種技術(shù)偏向于讓車(chē)輛進(jìn)行即使演算,通過(guò)攝像頭和雷達(dá)等車(chē)載設(shè)施的配合讓車(chē)輛達(dá)到自動(dòng)駕駛目的。

第二種以V2V(vehicle to vehicle意為車(chē)車(chē)信息交互)和V2X(Vehicle to X意為車(chē)與外界信息交互)為基礎(chǔ),讓車(chē)輛通過(guò)移動(dòng)互聯(lián),與周邊環(huán)境建立信息通訊,從而得知實(shí)時(shí)交通狀況,實(shí)現(xiàn)可預(yù)見(jiàn)性自動(dòng)駕駛。

現(xiàn)如今,這兩種技術(shù)都有不小進(jìn)步,但距離真正意義上的自動(dòng)駕駛,還是具有相當(dāng)一段差距的。
以ADAS為基礎(chǔ)的自動(dòng)駕駛:
為什么要將ADAS作為自動(dòng)駕駛的基礎(chǔ)呢?原因很簡(jiǎn)單,因?yàn)锳DAS儼然已經(jīng)具備了量產(chǎn)基礎(chǔ),各種駕駛輔助系統(tǒng)向中低端車(chē)型逐步滲透就是最好證明。

目前,雖說(shuō)ADAS的全球市場(chǎng)滲透率還不高,大約只有5%,但隨著汽車(chē)安全性和智能化需求的增加,未來(lái)ADAS的市場(chǎng)滲透率還會(huì)大幅度提升。根據(jù)咨詢(xún)公司PRNewswire預(yù)測(cè),到了2020年,全球ADAS滲透率將會(huì)達(dá)到25%,全球新車(chē)ADAS搭載率更是有望突破50%,如此龐大的一個(gè)滲透基數(shù),用來(lái)作為自動(dòng)駕駛的基礎(chǔ)難道還不夠么?

并且,ADAS在硬件方面也都相當(dāng)成熟,博世、恩智浦、大陸等零部件供應(yīng)商每年向車(chē)企供應(yīng)的傳感器、執(zhí)行器早已達(dá)到千萬(wàn)數(shù)量級(jí),如此龐大的一個(gè)供應(yīng)量足以說(shuō)明,ADAS在硬件方面已經(jīng)相當(dāng)可靠。特別是恩智浦近日還利用最新BlueBox引擎,發(fā)布了功能強(qiáng)大的自動(dòng)駕駛平臺(tái)。

不過(guò)僅僅依靠ADAS就能夠?qū)崿F(xiàn)自動(dòng)駕駛么?當(dāng)然不是。拿特斯拉為例,特斯拉在ADAS領(lǐng)域做得可謂超前,但它依舊只能達(dá)到二級(jí)自動(dòng)駕駛水準(zhǔn),這一切的原因還是由于缺乏高精度地圖的有效支持。
現(xiàn)如今,高精度地圖儼然已經(jīng)成為自動(dòng)駕駛的必要不充分條件。根據(jù)地圖廠商的劃分,高精度地圖大致可以分為兩大類(lèi),第一種是ADAS級(jí)高精度地圖,它的精確程度可以達(dá)到米級(jí);第二種是HAD級(jí)高精度地圖,它的精確程度更是可以達(dá)到厘米級(jí)別。
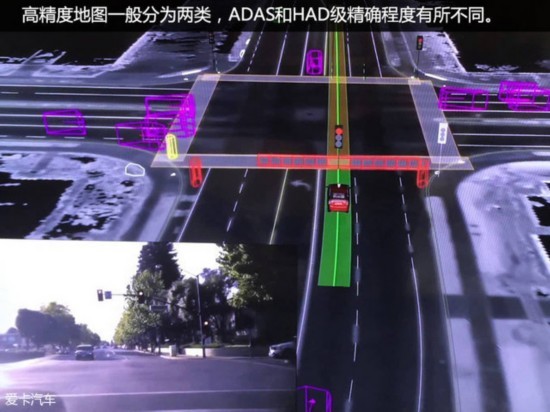
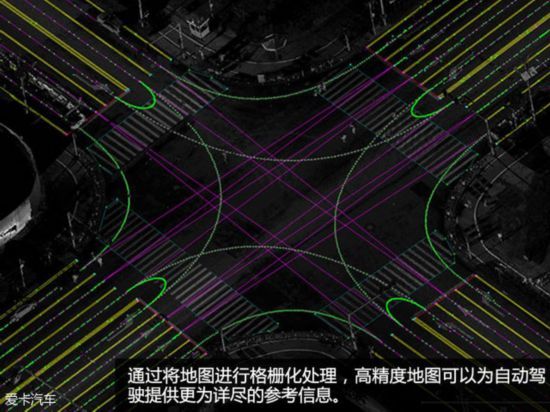
由于兩種地圖的目的不同,ADAS級(jí)更多只是收錄道路形狀、坡度等基本信息,然后用于配合車(chē)輛本身的駕駛輔助系統(tǒng),減輕駕駛壓力。HAD級(jí)收集的信息則更為精準(zhǔn),車(chē)道類(lèi)型、寬度,道路周?chē)h(huán)境,它都會(huì)詳細(xì)記錄,這樣一來(lái)車(chē)輛才會(huì)有更為詳盡的參考信息,所以在ADAS的基礎(chǔ)上,高精度地圖已然成為不可或缺的一部分。
不過(guò)由于城市道路的復(fù)雜性,高精度地圖在城市內(nèi)部道路的采集還是具有相當(dāng)難度,發(fā)展成熟還需假以時(shí)日。

以車(chē)聯(lián)網(wǎng)為主導(dǎo)的自動(dòng)駕駛:
說(shuō)完以ADAS為基礎(chǔ)的自動(dòng)駕駛,我們?cè)賮?lái)談?wù)勔攒?chē)聯(lián)網(wǎng)為主導(dǎo)的自動(dòng)駕駛又是怎么一回事?
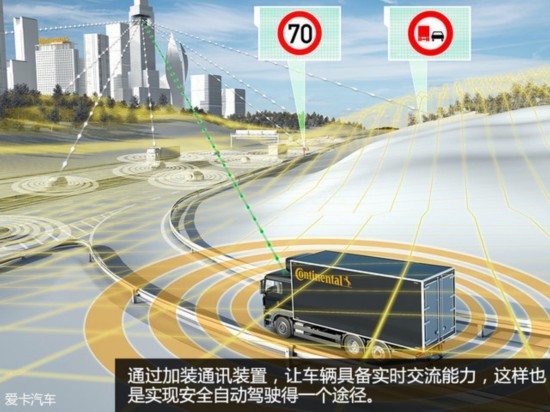
簡(jiǎn)單來(lái)講,V2V和V2X技術(shù)理念就是在汽車(chē)上加裝一個(gè)通訊設(shè)備,然后將交通指示燈、道路標(biāo)識(shí)、道路行駛車(chē)輛、行人等全都作為信號(hào)發(fā)射源來(lái)進(jìn)行實(shí)時(shí)通訊。這樣就算汽車(chē)本身不具備探測(cè)能力,但通過(guò)不斷詢(xún)問(wèn)周邊車(chē)輛和交通設(shè)施,也能夠了解其周邊的交通環(huán)境,從而實(shí)現(xiàn)安全的自動(dòng)駕駛。
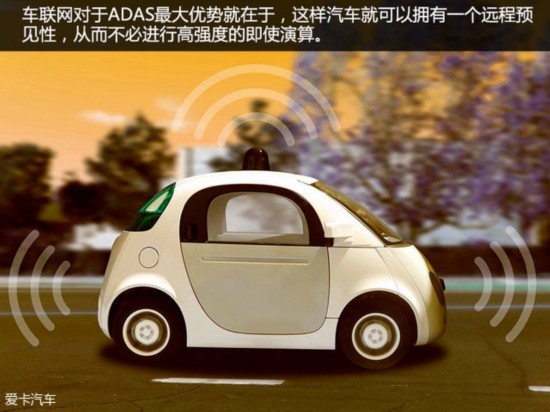
V2V、V2X技術(shù)相對(duì)于ADAS的最大優(yōu)勢(shì)就在于,它可以讓車(chē)輛具備預(yù)見(jiàn)性,而不是到了眼前才做出應(yīng)有反應(yīng)。拿信號(hào)燈為例,ADAS是基于攝像頭來(lái)識(shí)別圖像,通過(guò)算法來(lái)判斷信號(hào)燈究竟是紅是綠的,而V2X可以讓車(chē)輛在百米之外就收到信號(hào),從而得知信號(hào)燈狀態(tài),這就讓自動(dòng)駕駛變得更為簡(jiǎn)單。
不過(guò),這種技術(shù)依舊需要高精度地圖作為基礎(chǔ)。它最大的難點(diǎn)在于,在所有交通設(shè)備上都加裝信號(hào)接收裝置和通訊器材是一件非常龐大的事情,并且信號(hào)頻率如何統(tǒng)一也是擺在研究人員面前的難題。